👨🏽💻 by Harith Onigemo on March 14, 2024
Week 21, I am focusing more on the prototype hardware, I have figured out how the sorting mechanism and designed the 3D model of the prototype check it out!
After setting up most of the software aspect of this project, it is time to get our hands dirty with some hardware implementation. Okay, the AI model is up and running on the cloud and ready for inference, but how do we sort the waste after inference? This question troubled me until I found a solution while scrolling through YouTube for inspiration.
This reel showcases a pan and tilt servo kit that can rotate and tilt along the angle range of a servo motor. This mechanism would suffice for finding the correct bin and dumping the bin in the correct bin. After seeing the video, I acquired the kit from Amazon and started assembly. Afterwards, the idea began to come to life.

Since the prototype is supposed to segregate plastic and cans from other waste materials, the sorting mechanism will need to tilt on both sides for plastic or metal, then rotate and tilt to sort the other waste types.
Okay, our sorting mechanism is now sorted. Next, we need to represent how the prototype should look visually. I have been holding off on this part of the project for a while because I find the software part of this project more straightforward and familiar. Nonetheless, I am committed to completing this project, so I have to deal with it.
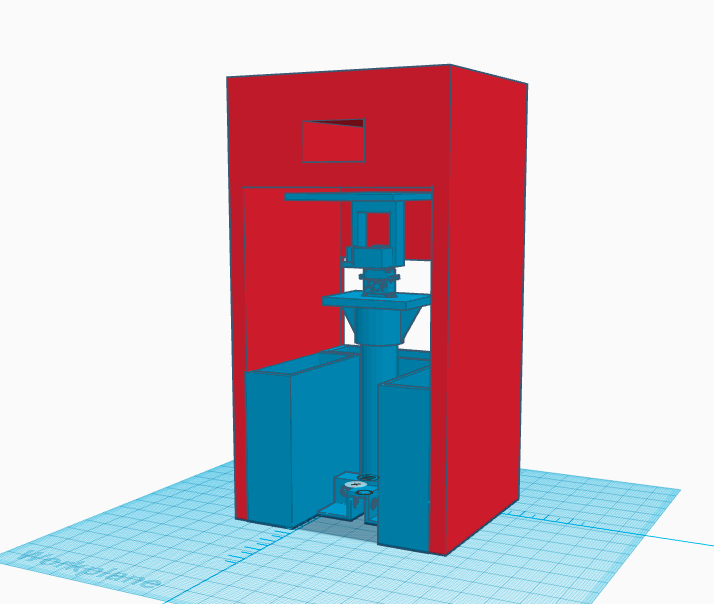
I had ideas on how I wanted different parts of the project to look, but I needed to figure out how everything would come together. So, I headed to Tinker CAD and designed everything together. There are two main parts of the prototype.
The inner sorting mechanism
The waste collector and identifier.
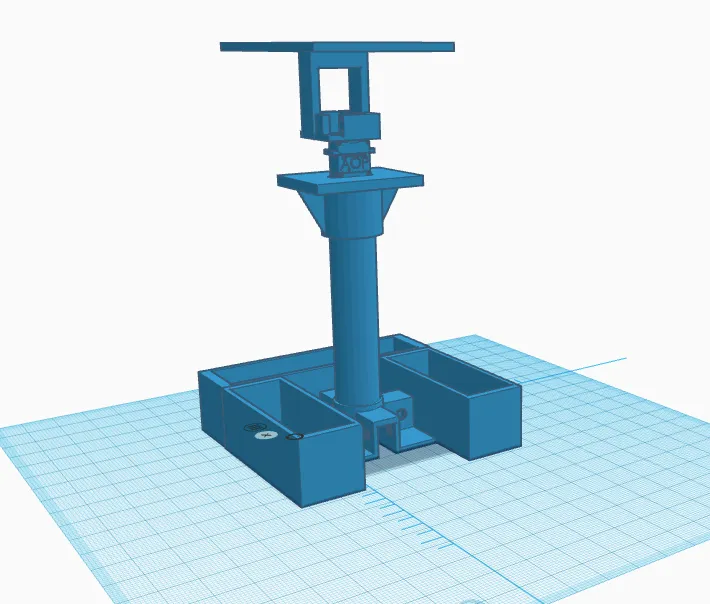
The inner sorting mechanism will contain the base, the support to hold the sorting mechanism and the different bins to hold the waste.
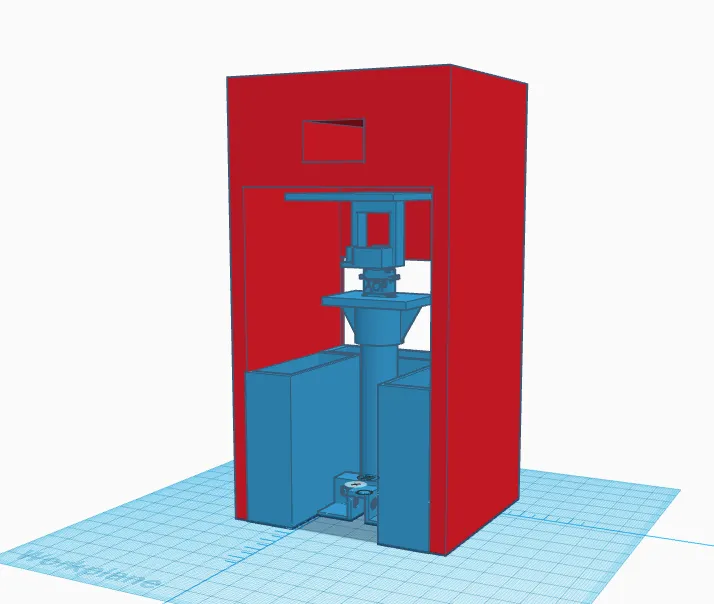
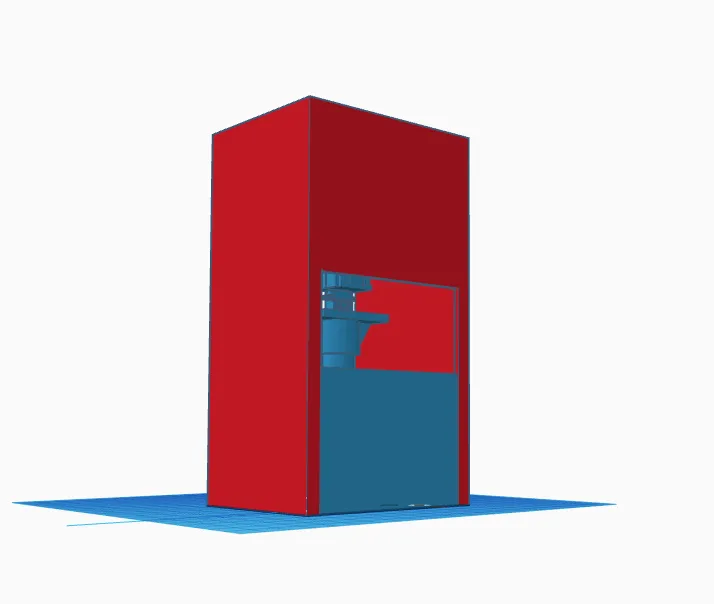
Then, the outer waste collector chassis allows users to dump waste and house the ESP32 camera to identify the waste. While I am still coming up with how that part should look, the overall design should look like this.
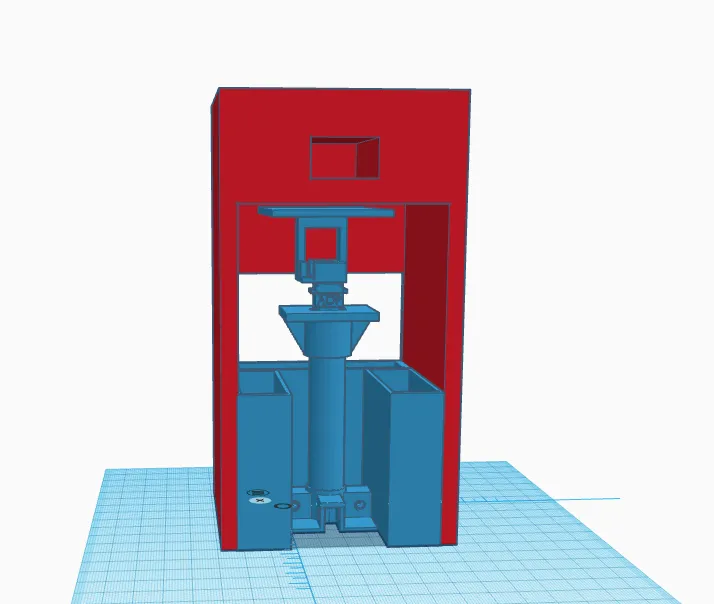
Designed the 3D model of the prototype.
Figured out, the sorting mechanism.
Started Coupling different hardware parts of the project.
Completed circuit design for camera system (Will be discussed next week).
This week I started more work on the hardware aspect of the prototype, this part of the project requires more thought and ingenuity to ensure the solution works as expected. There is no guide for a project like this, but I am grateful to the open source community for all the content out there serving as inspiration to engineers like me.