👨🏽💻 by Harith Onigemo on April 04, 2024
Week 23, I changed the camera system for a better solution, find out why and how the new system works.
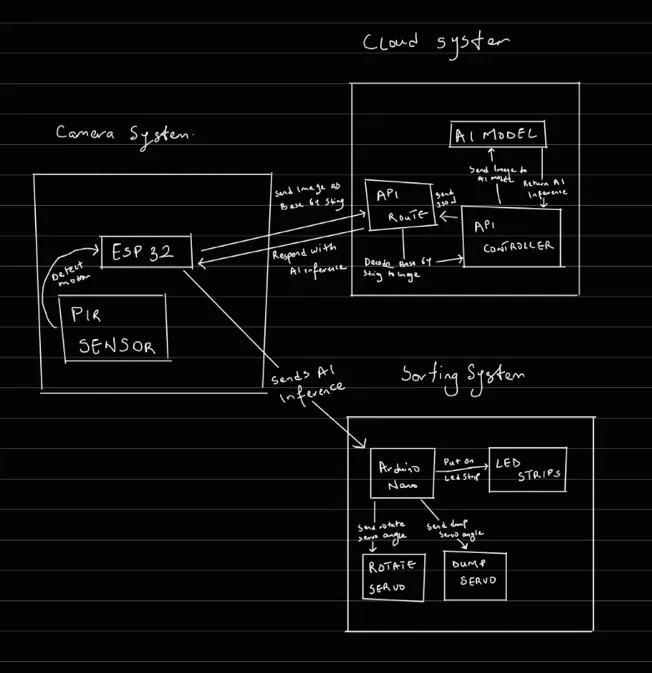
After testing the ESP Camera system, I noticed an issue that would not allow the prototype to accomplish its goals. Each system has been modularised to ensure that each system can work independently. However, it is crucial that each of the systems can communicate with each other. The ESP system is supposed to speak the AI inference to the sorting system so the sorting system will know what to sort.
The ESP camera system would communicate with the sorting system using Hardware Serial; this would entail using two pins on the ESP RX and TX pins. The pins will be connected to the other Arduino using jumper cables. While this method has worked in different projects, the connection tends to be unstable and prone to errors. This issue will render the prototype faulty if the communication between the ESP and sorting systems fails.
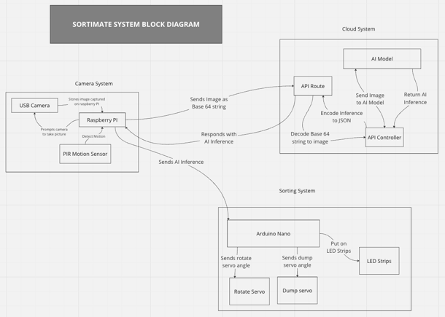
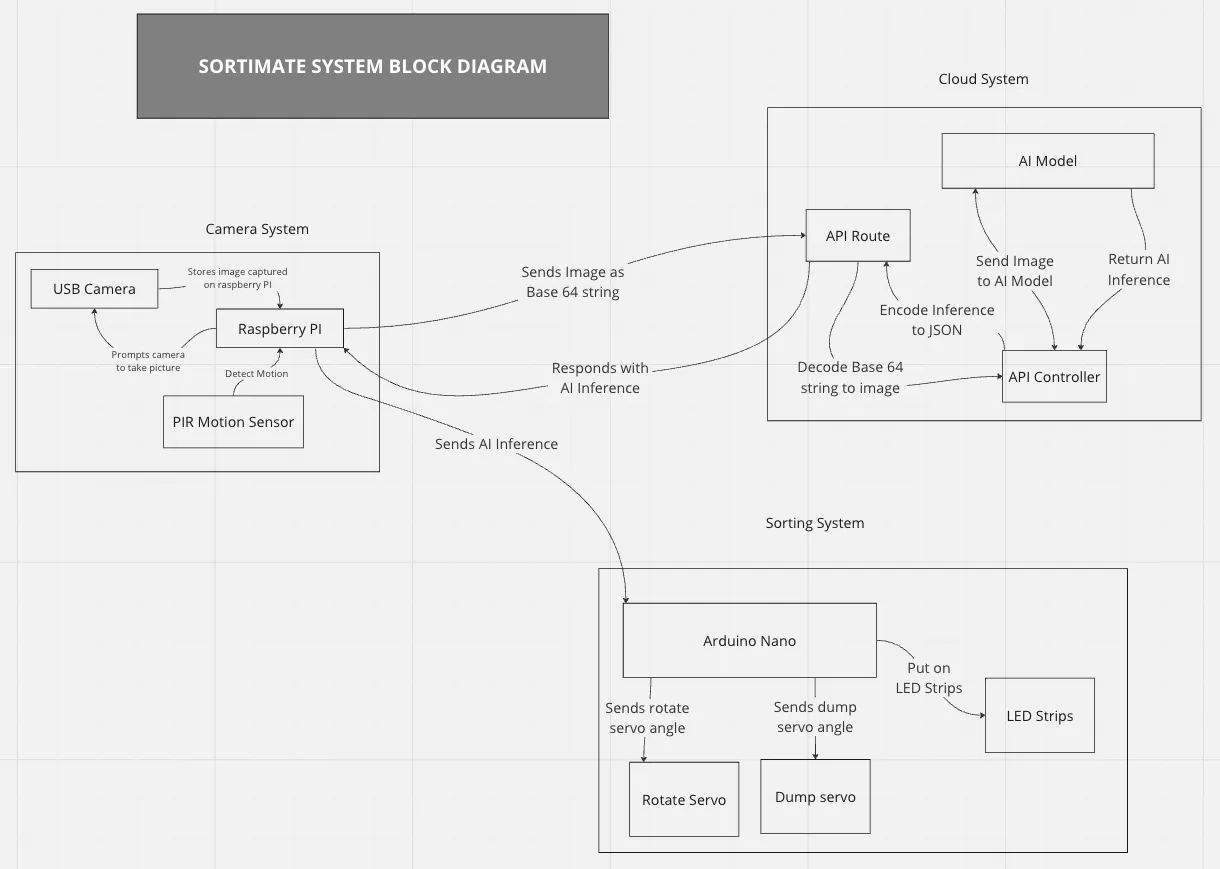
Here is a block diagram of the entire system to help you understand how everything works.
After weighing my options, I got a Raspberry Pi and a USB camera, which will be more expensive but more robust and reliable. The Raspberry Pi is a mini computer that will allow me to leverage its GPIO and processor to build a stronger camera system. The camera system now runs on Python and works perfectly when taking images and communicating with the other systems. Here is a block diagram of how the new system works.
Finished the chassis for the prototype.
I replaced the old camera system with a more reliable solution.
Added LED feedback for knowing what the AI model inferred.
I am 90% done with the project and will be rounding up soon.
After successfully integrating and testing the camera system, I wished I had started with this approach sooner, as it simplified the entire process and offered a better solution. The Raspberry Pi works perfectly, and I will consider using one before any other alternatives if the resources allow.